[고전역학 | Mechanics] 11. 회전 동역학

# 돌림힘

어떤 물체에 힘을 가해 물체가 회전한다면, 이러한 힘을 돌림힘 곧 토크라 한다.

돌림힘에 의한 물체의 회전운동을 분석하기 위해, 물체에 가한 힘 F는 위치 벡터에 대해 수직인 성분과 평행한 성분으로 나눌 수 있다. 위치 벡터와 같은 방향의 지름 성분은 회전을 일으키지 않는다. 그러나 위치 벡터와 수직인 접선 성분은 Fsinϕ와 같이 나타낼 수 있으며, 이 힘으로 인해 물체는 회전하게 된다.
또한, 돌림힘은 작용점이 회전축으로부터 얼마나 멀리 떨어져 있는가에 따라서도 다른 값을 갖게 된다.
즉, 돌림힘은 접선 성분 힘과 작용점과의 거리에 따라 다른 값을 가지므로, 다음과 같이 정의할 수 있다.
돌림힘은 접선 성분 힘에 거리를 곱하여 계산할 수 있지만, 힘에 수직거리를 곱하여 계산할 수도 있다.
두 번째 식으로부터

는 힘 F의 연장선과 회전축 사이의 수직거리이며, 이를 F의 ‘모멘트 팔’ 또는 ‘지레의 팔’이라고 한다.
이때, 힘 F의 연장선을 F의 작용선이라 한다.

토크의 SI 단위로는 뉴턴-미터(N⦁m)를 사용한다.
이 단위는 일의 단위 (1J=N⦁m)와 같지만, 나타내고자 하는 의미는 완전히 다르므로 이를 구분하여 사용하여야 한다.
돌림힘의 방향이 반시계 방향인 경우 토크는 양의 값을 가지며, 시계 방향인 경우 음의 값을 갖는다.
즉, 돌림힘은 방향을 갖는 벡터량이므로 이를 벡터로써 표현할 수 있다. rFsinϕ는 과 F의 벡터곱과 같으므로,
이며, 오른손 규칙을 적용할 수 있다. 지면에서 나오는 벡터는 ⦁로 나타내고, 지면으로 들어가는 벡터는 ×로 나타낸다.

다음으로, 돌림힘을 뉴턴 제 2법칙을 활용하여 표현해본다.

회전축으로부터 r만큼 떨어진 지점에 질량 m인 한 입자에 힘 F를 가해 입자가 원 궤도를 따라 회전운동을 한다.
뉴턴 제 2법칙에 따라 접선 성분 힘과 접선 가속도의 관계식을 나타내면,

와 같이 나타낼 수 있다. 이때, 입자에 작용하는 토크를 계산하면

이다. 접선 가속도는 각가속도와 반지름의 곱과 같으므로
이다. 이 식을 물체를 구성하는 모든 입자에 대해 적용한 뒤, 이를 모두 합하면

와 같이 표현할 수 있다. 이때, 관성모멘트의 정의로부터

이므로
이다. 위 식은 물체를 구성하는 모든 입자의 각가속도가 동일하다고 가정하였으므로, 강체의 경우에만 적용할 수 있다.
따라서, 돌림힘에 대한 세 가지 표현을 다음과 같이 정리할 수 있다.

# 일과 회전 운동 에너지
임의의 입자에 힘 F를 가해 입자가 원 궤도를 따라 회전운동을 한다.
이 입자는 짧은 시간 간격 dt 동안 고정된 축에 대해 짧은 각 dθ 만큼 회전한다.
이 입자에 거리 ds를 움직이는 동안 힘 F가 한 일은 ds = Rdθ 이므로

와 같이 나타낼 수 있다.
그러므로 각도가 θ₁에서 θ₂까지 변하는 동안 돌림힘에 의한 총 일은 다음과 같다.
이때 가해진 돌림힘이 일정한 경우,
와 같이 나타낼 수 있다.
혹은 I가 일정한 값을 갖는 강체에서 가해진 힘이 알짜 돌림힘이라면,
로부터

의 적분을 다음과 같이 변형시킬 수 있다.
회전운동에서 강체에 가한 일을 시간에 대해 미분하여 회전운동에 대한 일률을 구할 수 있다.
위 식에서 좌변은 시간에 대한 일의 비율 즉, 일률 P이고, 우변의 dθ/dt는 각속도 값을 의미한다.
따라서

이다.
다음은 병진운동과 회전운동의 물리량을 비교한 표이다.

#굴림운동
고정된 회전축에서 강체의 회전운동을 분석했던 앞의 내용과는 달리, 이번에는 움직이는 회전축에 대해 운동을 분석한다. 회전축이 움직이는 경우의 운동은 회전운동과 병진운동이 결합으로 나타낼 수 있다.
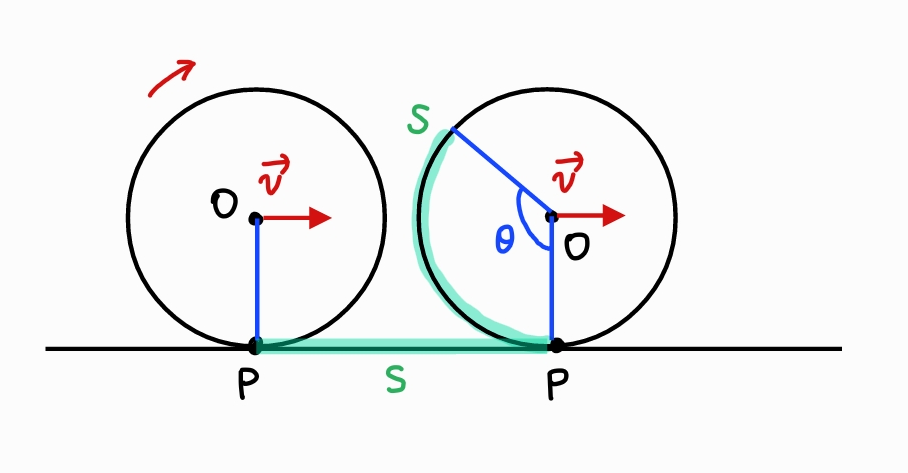
그림과 같이 미끄러지지 않고 굴러가는 강체의 질량 중심 O는 일정한 속력 v로 운동한다.
이때 강체와 바닥 면이 접촉하는 점 P도 속력 v로 움직인다.
시간 t 동안 점 O와 점 P가 모두 거리 s만큼 움직였을 때, 움직인 거리 s는 반지름과 회전 각도 θ의 곱으로 나타낼 수 있다.
s = θR
굴러가는 물체 중심의 선속도 v는 ds/dt이고, 물체의 중심에 대한 각속도 w는 dθ/dt이다.
식 s = θR의 양변을 시간에 대해 미분하면,
v = wR

위 그림에서 바닥에 접촉한 점 1은 순간적으로 정지해 있고 바퀴에서 제일 꼭대기 점인 점 3은 질량 중심보다 2배 빠르게 앞으로 움직이며, 측면의 점 2와 4의 속도는 방향이 수평에 대해 각각 45도를 이룬다.
또한, 굴림운동은 동역학적 관점으로도 분석할 수 있다.
총질량이 M인 어떤 물체의 질량 중심의 가속도는 이 물체에 작용하는 모든 외력이 질량 M인 질점에 작용할 때의 이 질점의 가속도와 같으므로,
와 같이 나타낼 수 있다. 이를 뉴턴 제 2법칙의 회전운동 식으로도 기술할 수 있다.
위 식은 고정된 회전축을 따라 회전하는 경우에서 유도하였으나, 질량 중심을 통과하는 회전축이 물체의 대칭축과 일치하는 경우와 회전축의 방향이 바뀌지 않는 경우 회전축이 고정되지 않더라도 적용할 수 있다.
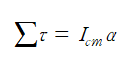
다음으로, 굴림운동 시 마찰력이 작용하는 경우에 대해 분석한다.
바퀴가 미끄러지지 않는 경우 바퀴에는 정지마찰력이 작용하고, 위에서 구한 방정식 a=αR을 적용할 수 있다.
그러나 바퀴가 미끄러지는 경우 바퀴에는 운동마찰력이 작용하게 되고, 위에서 구한 회전운동 방정식 a=αR을 적용할 수 없으므로 이러한 운동은 다루지 않는다.
바퀴를 빠르게 회전시키면 바퀴의 밑바닥이 점 P에서 왼쪽으로 미끄러지려고 한다.
점 P에서의 마찰력은 바퀴가 미끄러지지 않게 하기 위해 점 P에서 오른쪽으로 바퀴에 작용하게 된다.
이로부터 경사면을 따라 내려오는 굴림운동을 가정한다

질량이 M이고 반지름이 R인 둥글고 균일한 물체를 가정한다. 이 물체는 경사각 θ를 갖는 경사면을 따라 굴러 내려온다.
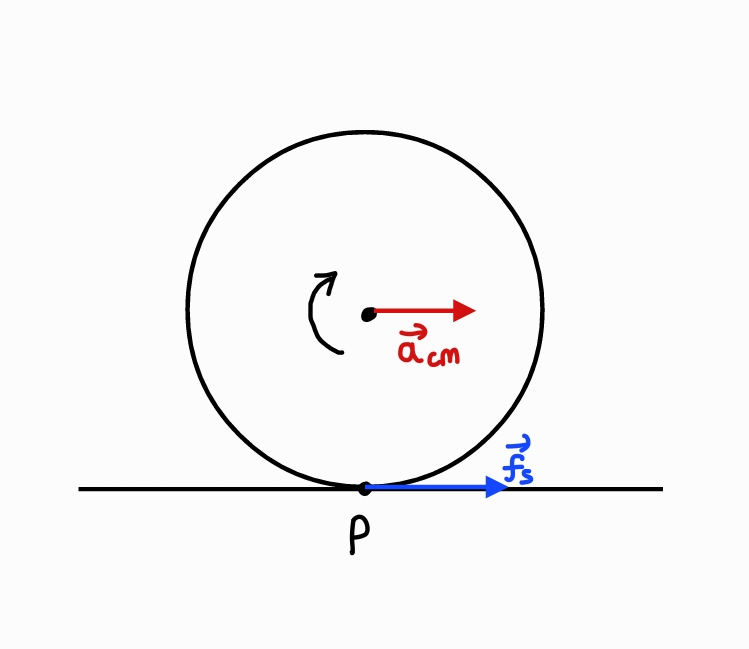
먼저 물체의 가속도를 구하기 위해 선운동에 적용되는 뉴턴의 제 2법칙과 회전운동에 적용되는 뉴턴의 제 2법칙을 적용한다. 정지 마찰력은 접촉점 P에 작용하고, 물체가 미끄러지려는 방향과 반대 방향인 경사면 위쪽으로 향한다.
먼저 경사면 방향에 대해서 뉴턴의 제 2법칙을 적용하면
을 얻는다.
여기서 정지 마찰력은 최대 정지 마찰력이 아니라 미끄러지지 않고 경사면을 굴러 내려갈 때의 마찰력임을 유의한다.
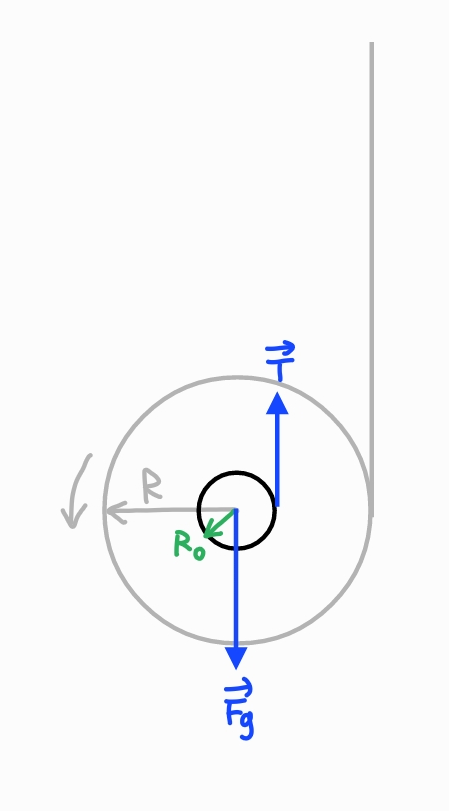
다음으로 회전운동에 대해서 뉴턴의 제 2법칙을 적용하면

이고, a=Rα를 대입한다. 여기에서 a는 경사면 아래로 향하는 방향이므로 음의 값을 갖으며, α는 반시계 방향이므로 양의 값을 갖는다. 즉, a=-Rα를 대입하여야 한다.
따라서

이다. 위 정지마찰력을 x축 성분에 대한 뉴턴 제 2법칙에 대입하면,

를 얻는다. 따라서 경사각이 θ인 경사면을 따라 구르는 물체의 선가속도를 얻을 수 있다.
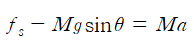
위에서 구한 구르는 물체의 선가속도식을 적용하기 위한 예로 요요를 가정한다.
요요를 거리 h만큼 풀어서 굴리면, 요요는 mgh만큼의 퍼텐셜 에너지가 운동 에너지와 회전 운동 에너지로 전환되어 저장된다. 요요가 다시 올라올때는 운동 에너지와 회전 운동 에너지가 다시 퍼텐셜 에너지로 전환된다.
요요는 계속 자전하다가 끈을 잡아당기는 순간 끈이 축에 걸림과 동시에 튕겨서 올라오게 된다.
끈의 끝 부분에서 요요의 회전 운동에너지는 요요를 초기에 정지상태에서 굴러 내리게 한 것 보다 초기 속력을 갖도록 아래로 던져 굴린 경우에 더 증가된다.
마지막으로, 굴림운동에서의 운동에너지를 계산한다.
입자로 구성된 강체가 굴림운동을 할 때, i번째 입자의 속력은 질량 중심 속력과 질량 중심에 대한 해당 입자의 상대속도의 벡터 합과 같다.


관성계에서의 운동에너지는 (1/2)mv²이며, v에 벡터 합한 위의 값을 대입한다.

이며, 다음과 같이 나타낼 수 있다.

첫 번째 항 ∑m은 입자의 총질량을 의미하며 M이다.
두 번째 항 ∑mv‘는 M과 질량 중심에 대한 질량 중심의 속도의 곱이며 따라서 0이다.
마지막 항은 질량 중심에 대한 상대속도로 계산한 각 입자의 운동 에너지 합이다. 이것은 질량 중심을 축으로 하는 회전 운동 에너지와 같다.
따라서 (1/2)Iw²와 같이 나타낼 수 있으며, 최종적으로 굴림운동의 운동에너지 식은
이다.
# 각운동량
원점 O에 대한 입자의 각운동량은 다음과 같이 정의하는 벡터이다.
각운동량 벡터는 위치 벡터와 입자의 선운동량과의 벡터 곱으로 표현할 수 있다.
원점 O에 따라 입자의 위치 벡터는 달라지므로, 원점 O에 따라 각운동량은 다른 값을 가지며 단위로는 kg⦁m²/s를 사용하며 이는 J⦁s와 같다.
각운동량 벡터의 방향을 구하기 위해 벡터 p의 꼬리를 원점으로 이동시킨 다음 오른손 규칙을 적용한다.

각운동량은 입자의 위치 벡터가 반시계방향으로 z축에 대해 회전하는 방향일 때 양의 값을 갖는다.
반대로 위치 벡터가 z축에 대해 시계방향으로 회전하는 경우 각운동량 벡터는 음의 값을 갖는다.
따라서 각운동량의 크기는 l=rmvsinϕ와 같다.
이로부터 알 수 있는 각운동량의 중요한 성질은 다음과 같다.
각운동량은 정해진 원점에 대해서만 의미가 있는 값이며, 각운동량 벡터의 방향은 항상 위치 벡터와 운동량 벡터가 만드는 평면에 수직이다.
이때, 어떤 입자에 알짜힘 F가 작용하면 입자의 속도와 운동량이 변화하고 따라서 각운동량도 변화한다.
각운동량의 시간 변화율을 구하기 위해 위에서 구한 각운동량 식을 시간의 함수로 미분한다.

첫 번째 항은 자기 자신과의 벡터 곱이므로 0이 된다. 두 번째 항은 알짜힘 F로 바꾸어 쓸 수 있다.
따라서,
이다. 위 식은 어떤 입자의 각운동량의 시간 변화율은 그 입자에 작용하는 알짜힘에 의한 돌림힘과 같다는 의미를 지닌다.
이제 입자에서의 각운동량을 강체에서의 총 각운동량으로 확장하여 계산한다.
각속력 w로 z축을 중심으로 회전하는 강체를 가정한다. 강체는 xy평면 위에 놓여 있으며,
이 강체 내부의 작은 입자는 매 순간 위치 벡터에 수직한 속력으로 원점을 중심으로 하는 원운동을 한다.

강체 내의 I번째 입자의 각운동량의 크기는 다음과 같다.

즉, 강체 내의 모든 입자에 대한 각 운동량은 각각의 입자의 합과 같으므로

와 같이 나타낼 수 있다.
또한 입자의 각운동량 변화율은 그 입자에 작용하는 알짜힘에 의한 돌림힘과 같으므로, 입자로 구성된 계의 총 각운동량의 변화율은 계를 구성하는 모든 입자에 작용하는 모든 힘들에 의한 돌림힘의 합과 같다.
따라서,

와 같이 나타낼 수 있다.
이때, z축이 대칭축인 경우를 생각한다.

z축을 대칭축으로 하는 경우, 이 대칭축에 대해 서로 반대쪽에 있는 입자들의 대칭축에 대한 수직성분은 서로 상쇄된다.
따라서, 각 운동량 벡터의 방향은 대칭축과 같은 방향이며 그 크기는 L=Iw가 된다.
즉, 대칭축을 중심으로 회전하는 강체의 경우 다음과 같은 벡터 관계식이 성립한다.
대칭축이 공간상에 고정되어있는 경우, 두 벡터의 방향은 변하지 않고 크기만 변화할 것이다.
따라서 dL/dt = Idw/dt = Iα를 만족하므로 대칭축을 중심으로 회전하는 경우의 돌림힘의 합은 다음과 같이 나타낼 수 있다.

물체가 강체가 아닌 경우 I는 일정하지 않은 값을 가지며, 따라서 w가 일정하더라도 L은 일정하지 않은 값을 갖게 된다.
회전축이 대칭이 아닌 경우, 각운동량은 축과 평행하지 않게 된다. 이때 물체가 회전하면 각운동량 벡터는 회전축 주위의 원추 궤적을 따라 움직인다. 각운동량이 변하므로 각속도의 크기 w가 일정하더라도 물체에 알짜 외부 돌림힘이 작용하게 된다.
위의 식으로부터 계에 작용하는 알짜 외부 돌림힘이 없는 경우 dL/dt=0와 같이 표현할 수 있다.
양 변을 시간에 대해 적분하면, 각운동량은 상수 값을 갖게 된다.
이는 계의 작용하는 알짜 돌림힘이 0일 때, 계의 총 각운동량은 보존된다는 의미를 지니며, 이를 각운동량 보존 법칙(conservation of angular momentum)이라고 한다.

# 세차운동
회전축의 방향이 바뀌는 회전운동인 자이로스코프를 생각해본다.

위의 자이로스코프의 관성바퀴를 회전시키지 않고 축을 수평으로하여 잡고 있다가 놓게 되면, 중력으로 인해 축의 자유단 쪽은 그냥 낙하하게 된다. 그러나 관성바퀴가 회전하는 경우, 관성바퀴의 축을 중심으로 자전하는 운동과 결합하여 수평면상에서 관성 바퀴의 축이 일정한 원운동을 하는 운동이 발생한다. 이를 세차 운동(precession)이라고 한다.
이 세차 운동을 분석하기 위해, 먼저 관성바퀴가 회전하지 않는 경우의 운동을 살펴본다.

관성 바퀴는 관성 바퀴 축에 대해 관성 모멘트가 I이고, 질량이 M이며 대칭적이라고 가정한다.
관성 바퀴의 축은 x축 방향이고 자이로스코프에 작용하는 외력은 마찰이 없을 때, 지지점에 작용하는 수직 항력과 지지점에서 거리 r인 질량 중심에 작용하는 관성 바퀴의 무게 w이다.
수직항력은 지지점에 대해 돌림힘이 존재하지 않으며, 무게는 y방향으로의 돌림힘을 작용한다.
처음에는 회전하지 않았으므로 초기 각운동량은 0이다. 짧은 시간 간격 dt동안의 각운동량 변화는 다음과 같이 나타낼 수 있다.

이 변화는 타우가 y방향으로 작용하므로 y방향이 된다. 돌림힘의 방향은 시간이 지나도 일정하므로 시간 변화 dt에 따라 y방향으로의 각운동량이 추가적으로 dL만큼씩 변하게 된다.

이는 위에서 관성 바퀴를 바라본 모습이며, 일정하게 증가하는 각운동량은 곧 자이로스코프가 그것이 놓여있는 지면과 충돌할 때까지 y축을 중심으로 아래쪽으로 점점 빠르게 회전함을 의미한다.
이제 관성 바퀴가 처음부터 회전하고 있어서 초기 각운동량이 0이 아닌 경우를 생각해본다.

관성 바퀴는 대칭축을 중심으로 회전하므로 초기 각운동량은 축방향으로 향하게 된다.
그러나 관성 바퀴의 무게에 의해 발생한 돌림힘은 축에 수직이므로 각운동량의 변화량 dL은 축에 수직한 방향으로 작용한다. 이러한 변화 dL은 항상 수평 xy평면 상에서 작용하므로, 각운동량 벡터와 관성 바퀴축은 항상 수평을 유지하면서 움직이게 된다.

즉, 축은 떨어지지 않으며 세차운동을 하게 된다.
이 자이로스코프의 초기 각운동량은 L이다. 짧은 시간 간격 dt 후에 각운동량은 L+dL의 값을 갖게 된다.
이때, 미소 각운동량 변화량은 관성 바퀴의 무게에 의해 발생하는 값이므로

이며, 방향은 언제나 각운동량 벡터와 수직이 된다.

이러한 운동의 일부분을 위와 같이 상세히 나타낼 수 있으며, 자이로스코프의 관성 바퀴의 축이 작은 각

만큼 변한다는 것을 의미한다.
이 축이 시간에 따라 변하는 비율 dϕ/dt를 세차 각속력(precession angular velocity)이라 하고 Ω라 표시한다.
세차 각속력을 수식으로 표현하면,

와 같다.
따라서 세차 각속력은 회전축에 대한 자전 각속력에 반비례한 값을 갖는다. 자전을 빨리하는 바퀴는 천천히 세차 운동을 하게 되며, 마찰로 인해 관성 바퀴의 회전이 느려지는 경우 세차 각속력은 증가한다.
참고문헌 : Young and Freedman, 대학물리학 12th ed, Haliday 일반 물리학 9th ed